LLC的大功率智能充電器
充電器與人們的日常生活密切相關,充電器充電性能的好壞與被充電池的使用壽命、充電效率等息息相關。 由于外界溫度變化,電網電壓波動,因而大大降低了充電器充電性能的穩定性,這就需要有一種能自我調節的系統,遇到外界的干擾能實時做出回應,保證充電的(de)穩定性,不(bu)損壞被充電(dian)(dian)(dian)的(de)電(dian)(dian)(dian)池。 智能(neng)(neng)控制在(zai)(zai)此能(neng)(neng)提供(gong)一種很好的(de)解決方案。電(dian)(dian)(dian)源(yuan)行(xing)業已經開(kai)始(shi)在(zai)(zai)其(qi)產(chan)品中運用智能(neng)(neng)控制,通過(guo)單片機(ji)的(de)編程(cheng)對(dui)過(guo)壓(ya)、過(guo)流情況做出(chu)判斷(duan),為電(dian)(dian)(dian)池提供(gong)保護。 LLC 諧(xie)振(zhen)變(bian)(bian)換(huan)(huan)器(qi)(qi)在(zai)(zai)充電(dian)(dian)(dian)器(qi)(qi)的(de)運用也是越(yue)來越(yue)多,LLC 諧(xie)振(zhen)變(bian)(bian)換(huan)(huan)器(qi)(qi)的(de)拓撲本身具有一些優越(yue)的(de)性能(neng)(neng),可以實現原邊開(kai)關管(guan)在(zai)(zai)全負載下(xia)的(de)零電(dian)(dian)(dian)壓(ya)軟開(kai)關( ZVS ( Zero VoltageSwitch) ) ,副邊整流二極管(guan)電(dian)(dian)(dian)壓(ya)應力低,因(yin)此高(gao)(gao)輸出(chu)電(dian)(dian)(dian)壓(ya)的(de)情況下(xia)可以實現較高(gao)(gao)的(de)效率(lv)等(deng)。 這使得LLC 諧(xie)振(zhen)變(bian)(bian)換(huan)(huan)器(qi)(qi)特別適合高(gao)(gao)輸出(chu)電(dian)(dian)(dian)壓(ya)的(de)應用場合。 今(jin)后電(dian)(dian)(dian)源(yuan)的(de)發展方向(xiang)是用單片機(ji)來完成所有功能(neng)(neng),包括:脈寬(kuan)調控、反饋、過(guo)壓(ya)過(guo)流保護等(deng)等(deng)。
下面介紹的就是一款應比亞迪公司(B YD) 的要求,設計出的一種基于單片機的智能充電器。 該充電器對充(chong)電(dian)(dian)過程(cheng)進行智能控制(zhi),系統中的管(guan)理電(dian)(dian)路還具有(you)保護功能,可防止電(dian)(dian)池的過充(chong)和(he)過放對電(dian)(dian)池造成損壞。
1 LLC 諧振變換器
本充電器設計中要考慮整流濾波、能量轉換,電路保護、軟件設計等。 而LLC 諧振變換器是能量轉換中最重要的部分,關系到充電器性能的好壞。 下面著重介(jie)紹其基本(ben)結構、數學模型及時序分析。
1. 1 LLC 諧振變換器的基(ji)本結構
圖1 所示為LLC 諧(xie)(xie)振變換器的原理圖。 串聯(lian)諧(xie)(xie)振電(dian)感(gan)Lr 、串聯(lian)諧(xie)(xie)振電(dian)容(rong)(rong)Cr 和并聯(lian)諧(xie)(xie)振電(dian)感(gan)Lm ,構成LLC 諧(xie)(xie)振網絡(luo), Cr 也起到(dao)隔直(zhi)作(zuo)用[3 ] 。 在(zai)變壓器次級(ji),整(zheng)流二(er)極管直(zhi)接連接到(dao)輸出(chu)電(dian)容(rong)(rong)Co上。
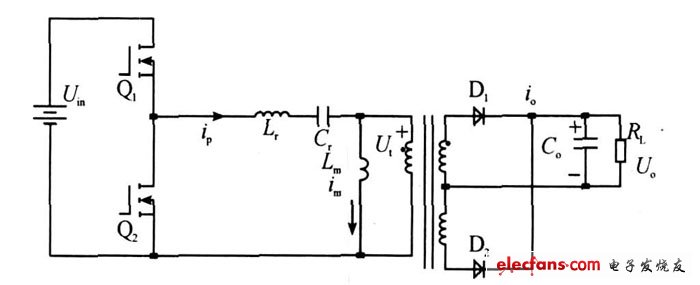
圖(tu)1 LLC 諧振變換(huan)器的(de)原理圖(tu)
當發生諧(xie)振(zhen)時,LC 的本征(zheng)諧(xie)振(zhen)頻率(lv)為:
![]()
當Lr , Cr 和Lm發生諧(xie)振時,LLC 本征(zheng)諧(xie)振頻率為:

由式(shi)(1) 、(2) 可(ke)知f1 》 f2 ,當負載RL 變化時,可(ke)以調(diao)節開關(guan)(Q1 、Q2 ) 頻(pin)率(lv)在f1 和(he)f2 間變化,使品質因數達到最大。 利(li)用這種特性,可(ke)以方(fang)便地(di)實現脈沖頻(pin)率(lv)模式(shi)PFM( Pul se Frequency Model) ,品質因數表(biao)示如下:
LLC 諧振網(wang)絡需要兩(liang)個磁性元件Lr 和Lm。
然而,考慮到高頻變壓器實際結構,可以把磁性元件Lr 和Lm 集成在一個變壓器內,利用變壓器的漏感作為Lr , 利用變壓器的磁化電感作為Lm , 這樣一來,可以大大減少磁性元件數目。 在設計時,只要重點設計變壓器的漏感與變壓器磁化電感即可。 因此, 為增加漏感, 需要在變壓器中加入適當的氣隙,并且控制變壓器原、副邊的繞線方式可以提高品質因素。
1. 2 LLC 的數學(xue)模型分析
通過上述(shu)分析,由圖1 的LLC 諧振變換器的原理圖得其LLC 等(deng)效模(mo)型如圖2 所示(shi)。
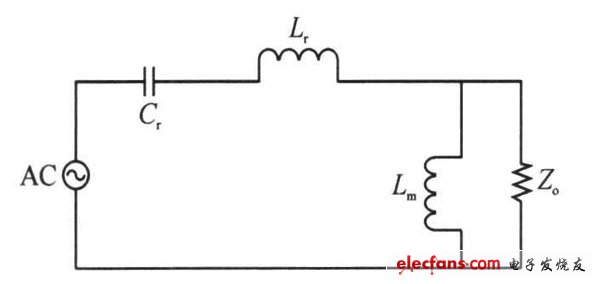
圖(tu)2 LLC 原理圖(tu)的等(deng)效模型圖(tu)
電(dian)壓傳(chuan)遞(di)函數為:
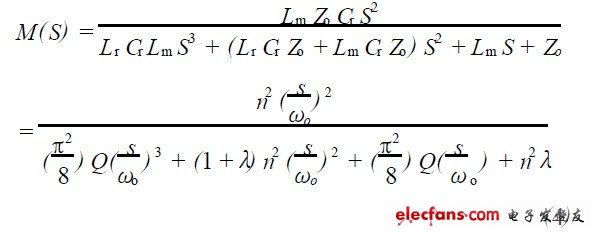
其中:
Q 為品質因(yin)數(shu)。
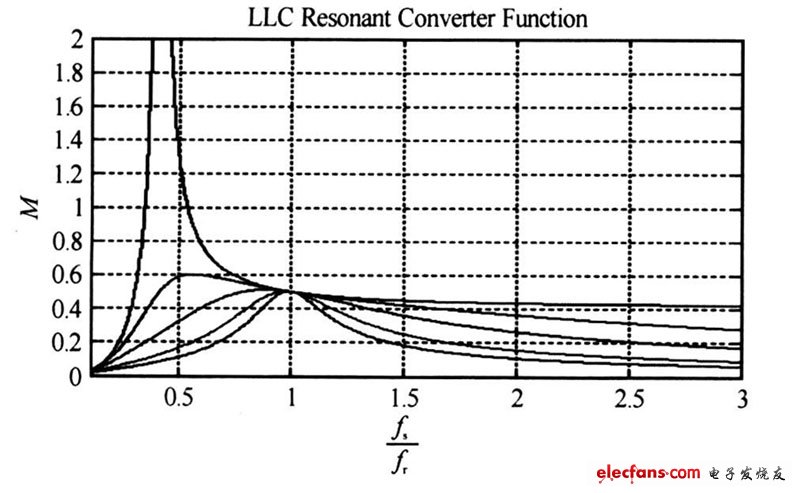
利用MA TIAB 對該模(mo)型進行(xing)仿真,可以初步分析出其工(gong)作(zuo)特性如圖3 所示(shi)。 其中f s 為(wei)啟動頻率(lv)(lv)( Start Frequency) f r 為(wei)諧振頻率(lv)(lv)( ResonantFrequency)。
圖(tu)3 LLC 諧振(zhen)工(gong)作特性。
從圖(tu)3 中可(ke)以(yi)看到,在(zai)(zai)整(zheng)個頻率圍內,既(ji)有降壓(ya)的(de)工(gong)(gong)作(zuo)(zuo)(zuo)(zuo)(zuo)區(qu)域(yu)(M 《 1) ,也(ye)有升(sheng)(sheng)壓(ya)的(de)工(gong)(gong)作(zuo)(zuo)(zuo)(zuo)(zuo)區(qu)域(yu)( M 》1) ,此LLC 諧(xie)(xie)振(zhen)有著較大的(de)應用范圍。 在(zai)(zai)輕負(fu)載(zai)(zai)時(shi),工(gong)(gong)作(zuo)(zuo)(zuo)(zuo)(zuo)頻率逐(zhu)漸升(sheng)(sheng)高, 工(gong)(gong)作(zuo)(zuo)(zuo)(zuo)(zuo)在(zai)(zai)降壓(ya)區(qu)域(yu)內; 而在(zai)(zai)重負(fu)載(zai)(zai)時(shi), 工(gong)(gong)作(zuo)(zuo)(zuo)(zuo)(zuo)頻率逐(zhu)漸降低, 工(gong)(gong)作(zuo)(zuo)(zuo)(zuo)(zuo)在(zai)(zai)升(sheng)(sheng)壓(ya)區(qu)域(yu)內。 由圖(tu)3 可(ke)知(zhi), 串聯諧(xie)(xie)振(zhen)的(de)工(gong)(gong)作(zuo)(zuo)(zuo)(zuo)(zuo)區(qu)域(yu)應該為(wei)f s / f r 》 1 ,才能工(gong)(gong)作(zuo)(zuo)(zuo)(zuo)(zuo)在(zai)(zai)ZVS 的(de)狀態(tai)。 在(zai)(zai)不(bu)同負(fu)載(zai)(zai)下(xia),為(wei)獲(huo)得ZVS 的(de)工(gong)(gong)作(zuo)(zuo)(zuo)(zuo)(zuo)條件(jian), 只要(yao)使之工(gong)(gong)作(zuo)(zuo)(zuo)(zuo)(zuo)在(zai)(zai)f s / f r 》 1的(de)右側(ce)即可(ke)。 而LLC 諧(xie)(xie)振(zhen)不(bu)僅僅局限于f s / f r 》 1 的(de)區(qu)域(yu), 在(zai)(zai)某些負(fu)載(zai)(zai)下(xia)可(ke)以(yi)工(gong)(gong)作(zuo)(zuo)(zuo)(zuo)(zuo)在(zai)(zai)f s / f r 《 1區(qu)域(yu)。 同樣可(ke)以(yi)獲(huo)得零(ling)電壓(ya)轉換的(de)工(gong)(gong)作(zuo)(zuo)(zuo)(zuo)(zuo)狀況。 并(bing)且與串聯諧(xie)(xie)振(zhen)相比,在(zai)(zai)不(bu)同負(fu)載(zai)(zai)時(shi)的(de)頻率變(bian)化范圍更(geng)小(xiao)。
1. 3 LLC 諧振變換器的時序分析(xi)
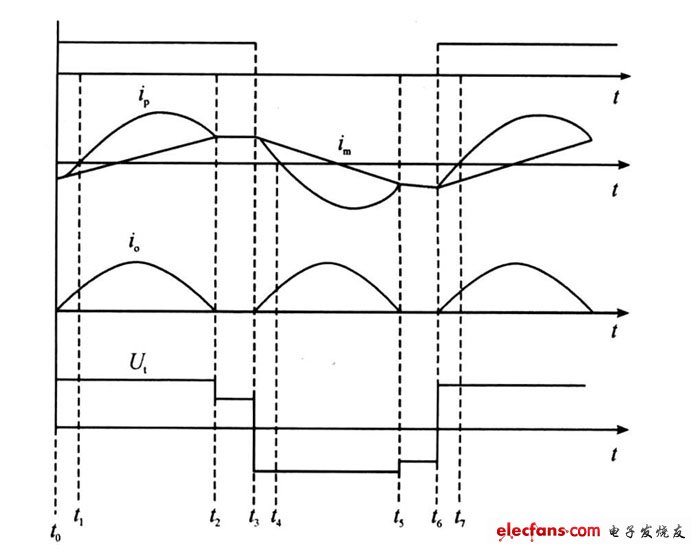
LLC 諧振(zhen)變(bian)換器(qi)(qi)由兩個主開關管Q1 和Q2 構成(cheng),其驅(qu)動信號是占空比固定為(wei)(wei)0. 5 的(de)互(hu)補驅(qu)動信號。 為(wei)(wei)了保證原邊功率MOS 管的(de)ZVS , 副邊二極管的(de)ZCS(Zero Current Switch) 都可(ke)以(yi)實現,工作(zuo)頻(pin)率在f 2 《 f ≤f 1 時, 其工作(zuo)波形圖(tu)如圖(tu)4 所示。 從圖(tu)中可(ke)以(yi)看出LLC 變(bian)換器(qi)(qi)工作(zuo)在半個周(zhou)期內可(ke)以(yi)分為(wei)(wei)三個工作(zuo)模式。
模式1 (t0 - t1):兩個開關管(guan)(guan)(guan)(Q1 、Q2 ) 都截止(zhi),Q1 的反(fan)向(xiang)(xiang)二(er)(er)級管(guan)(guan)(guan)導(dao)通續(xu)流(liu), Lr 上的電(dian)(dian)流(liu)逐(zhu)漸減(jian)小,變壓器產生感生電(dian)(dian)流(liu),向(xiang)(xiang)負載供電(dian)(dian)。 反(fan)向(xiang)(xiang)二(er)(er)極管(guan)(guan)(guan)的導(dao)通將Q1兩端的電(dian)(dian)壓鉗位在(zai)零。
模式2 (t1 - t2):Lr 上的電流(liu)(liu)在(zai)t1 時刻(ke)減小(xiao)到零,Q1 在(zai)此時刻(ke)導通, Lr 上的電流(liu)(liu)反向增(zeng)(zeng)大(da), 達到峰值后(hou)減小(xiao)。 Lm 上的電流(liu)(liu)先減小(xiao),然后(hou)反向增(zeng)(zeng)加。
可(ke)以看出,t1 時刻由于Q1 的反向二(er)極管(guan)的鉗位(wei)作用,Q1 的導通電(dian)壓為零。 此階段只有Lr 和Cr 進行(xing)諧振(zhen)。
圖(tu)4 工作時(shi)序波形圖(tu)
模(mo)式3 (t2 - t3):Lm 上(shang)的電流(liu)(liu)在t2 時刻與Lr上(shang)的電流(liu)(liu)相等,此時流(liu)(liu)過變(bian)壓(ya)器的電流(liu)(liu)為零,負載與變(bian)壓(ya)器被隔離(li)開。Q1 在此時刻關斷(duan),Q2的反向二極管導通續流(liu)(liu)。 此階段Lm 也加入到諧振部分, 與Lr 和Cr 串聯組成諧振回路(lu)。
在(zai)下半(ban)個(ge)周(zhou)期(qi)(qi)中, 電路(lu)的工(gong)作(zuo)與上(shang)半(ban)個(ge)周(zhou)期(qi)(qi)剛(gang)剛(gang)相(xiang)似,只是方向相(xiang)反。整個(ge)周(zhou)期(qi)(qi)的電路(lu)工(gong)作(zuo)波形:在(zai)上(shang)半(ban)個(ge)周(zhou)期(qi)(qi)中,開關管(guan)Q1 為(wei)零(ling)(ling)電壓導通, 而(er)Q1 在(zai)t3 時刻的關斷電流(liu)im 很小(xiao); 在(zai)下半(ban)個(ge)周(zhou)期(qi)(qi)中,開關管(guan)Q2 為(wei)零(ling)(ling)電壓導通,而(er)Q2 在(zai)t6 時刻的關斷電流(liu)im 很小(xiao),所以Q1 、Q2 工(gong)作(zuo)時的開關損耗很小(xiao)。
2 充電(dian)器硬件設計(ji)
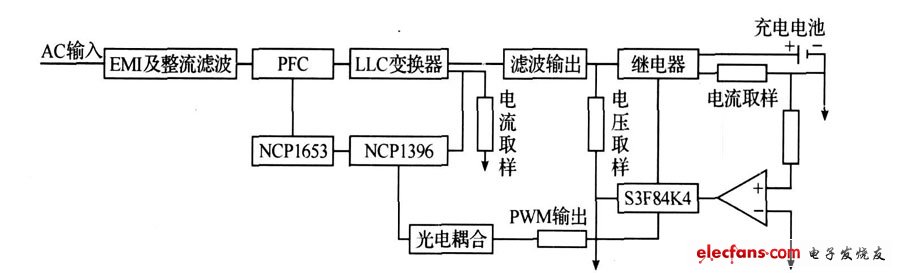
經過上面(mian)的(de)分(fen)析,設計中(zhong)采用(yong)電(dian)流、電(dian)壓(ya)負反饋(kui)的(de)方法來達到恒(heng)流、恒(heng)壓(ya)充(chong)電(dian)的(de)目的(de),充(chong)電(dian)器(qi)硬件原理(li)框(kuang)圖(tu)如圖(tu)5 所示。
圖(tu)5 充電器(qi)的(de)硬件原理框(kuang)圖(tu)
交流(liu)電(dian)(dian)經過(guo)濾波整(zheng)流(liu)后,流(liu)向NCP1653,由(you)其(qi)提供(gong)PFC(Power Factor Correction) 操作(zuo),NCP1653是(shi)一款連(lian)續導通型(xing)(CCM) 的(de)(de)功率因數校正( PFC) 升(sheng)壓(ya)(ya)(ya)式的(de)(de)上升(sheng)控(kong)(kong)制(zhi)電(dian)(dian)路(lu), 它(ta)(ta)的(de)(de)外(wai)圍元器(qi)件數量很少,有效(xiao)地減(jian)少了(le)升(sheng)壓(ya)(ya)(ya)電(dian)(dian)感的(de)(de)體(ti)積(ji), 減(jian)小了(le)功率MOS管的(de)(de)電(dian)(dian)流(liu)應(ying)力,從(cong)而降低(di)了(le)成(cheng)本,且極大地簡化了(le)CCM 型(xing)的(de)(de)PFC 的(de)(de)操作(zuo),它(ta)(ta)還集成(cheng)了(le)高可靠的(de)(de)保(bao)護功能。 NCP1396 電(dian)(dian)路(lu)為(wei)整(zheng)個硬件電(dian)(dian)路(lu)提供(gong)保(bao)護(包括有反饋環路(lu)失效(xiao)偵(zhen)測(ce)、快速與低(di)速事(shi)件輸(shu)入(ru),以(yi)及可以(yi)避(bi)免在低(di)輸(shu)入(ru)電(dian)(dian)壓(ya)(ya)(ya)下工(gong)作(zuo)的(de)(de)電(dian)(dian)源(yuan)電(dian)(dian)壓(ya)(ya)(ya)過(guo)低(di)偵(zhen)測(ce)等) ,NCP1396 的(de)(de)獨(du)特架構包括一個500 kHz 的(de)(de)壓(ya)(ya)(ya)控(kong)(kong)振蕩器(qi),由(you)于在諧振電(dian)(dian)路(lu)結構中避(bi)開諧振尖(jian)峰相當重要(yao),因此(ci)為(wei)了(le)將(jiang)轉換器(qi)安排在正確的(de)(de)工(gong)作(zuo)區,NCP1396 內置(zhi)了(le)可調整(zheng)且精(jing)確的(de)(de)最低(di)開關頻(pin)率,通過(guo)專(zhuan)有高電(dian)(dian)壓(ya)(ya)(ya)技術支持。 應(ying)用S3F84K4 單片機實(shi)現智能充電(dian)(dian)器(qi)控(kong)(kong)制(zhi)。
3 軟件設計
為(wei)滿(man)足充(chong)電要求, 該充(chong)電器軟件設計除了完成充(chong)放電控(kong)制外, 還(huan)具(ju)有(you)過流保護(hu)、過壓保護(hu)、過溫保護(hu)、短(duan)路報警等功能模(mo)塊(kuai)。主程序流程圖(tu)如圖(tu)6 所示(shi)。
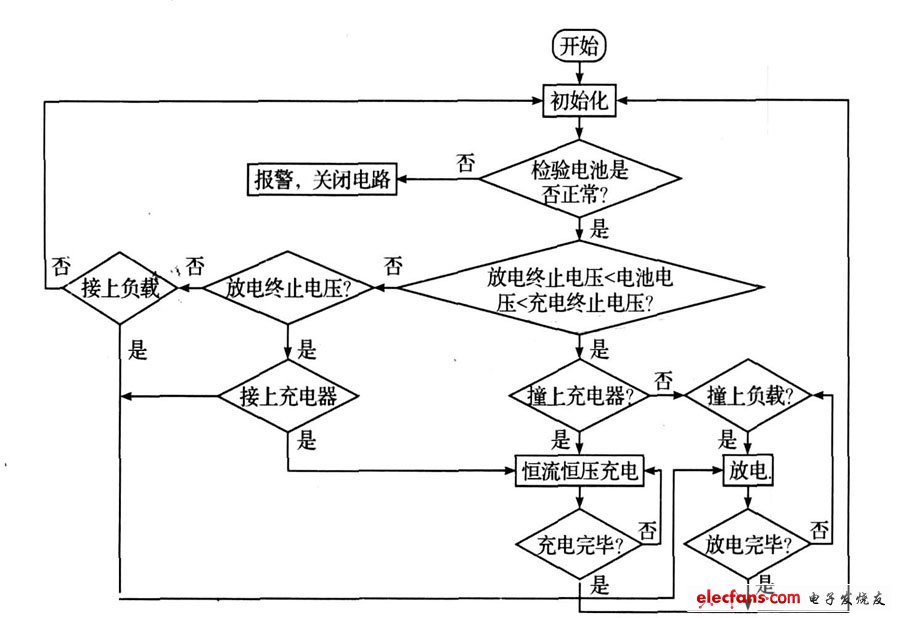
圖(tu)6 主程(cheng)序流程(cheng)圖(tu)。
程(cheng)序開始執行(xing)(xing)后, 首先(xian)進(jin)行(xing)(xing)初始化并(bing)檢測(ce)(ce)電(dian)(dian)(dian)(dian)(dian)(dian)(dian)池電(dian)(dian)(dian)(dian)(dian)(dian)(dian)壓(ya)、電(dian)(dian)(dian)(dian)(dian)(dian)(dian)流、溫度等信(xin)息是否(fou)正常。 如(ru)正常則(ze)(ze)(ze)(ze)進(jin)入下(xia)一步。 否(fou)則(ze)(ze)(ze)(ze)報(bao)警(jing)并(bing)關(guan)閉電(dian)(dian)(dian)(dian)(dian)(dian)(dian)路(lu)。 如(ru)果(guo)(guo)電(dian)(dian)(dian)(dian)(dian)(dian)(dian)池電(dian)(dian)(dian)(dian)(dian)(dian)(dian)壓(ya)在(zai)充(chong)電(dian)(dian)(dian)(dian)(dian)(dian)(dian)終(zhong)(zhong)止(zhi)電(dian)(dian)(dian)(dian)(dian)(dian)(dian)壓(ya)和放電(dian)(dian)(dian)(dian)(dian)(dian)(dian)終(zhong)(zhong)止(zhi)電(dian)(dian)(dian)(dian)(dian)(dian)(dian)壓(ya)之間, 說明電(dian)(dian)(dian)(dian)(dian)(dian)(dian)池既可充(chong)電(dian)(dian)(dian)(dian)(dian)(dian)(dian)也可放電(dian)(dian)(dian)(dian)(dian)(dian)(dian)。 此時電(dian)(dian)(dian)(dian)(dian)(dian)(dian)路(lu)將判斷(duan)(duan)接(jie)上充(chong)電(dian)(dian)(dian)(dian)(dian)(dian)(dian)機還(huan)是接(jie)上負(fu)(fu)載(zai)。 以進(jin)行(xing)(xing)相(xiang)應(ying)的(de)充(chong)電(dian)(dian)(dian)(dian)(dian)(dian)(dian)和放電(dian)(dian)(dian)(dian)(dian)(dian)(dian)。 如(ru)果(guo)(guo)兩(liang)者都沒有(you)接(jie)則(ze)(ze)(ze)(ze)循環檢測(ce)(ce)過(guo)程(cheng)。 若電(dian)(dian)(dian)(dian)(dian)(dian)(dian)池電(dian)(dian)(dian)(dian)(dian)(dian)(dian)壓(ya)已經(jing)到達(da)充(chong)電(dian)(dian)(dian)(dian)(dian)(dian)(dian)終(zhong)(zhong)止(zhi)電(dian)(dian)(dian)(dian)(dian)(dian)(dian)壓(ya)。 則(ze)(ze)(ze)(ze)等待負(fu)(fu)載(zai)的(de)接(jie)入進(jin)行(xing)(xing)放電(dian)(dian)(dian)(dian)(dian)(dian)(dian);同樣若電(dian)(dian)(dian)(dian)(dian)(dian)(dian)池電(dian)(dian)(dian)(dian)(dian)(dian)(dian)壓(ya)己經(jing)達(da)到放電(dian)(dian)(dian)(dian)(dian)(dian)(dian)終(zhong)(zhong)止(zhi)電(dian)(dian)(dian)(dian)(dian)(dian)(dian)壓(ya),則(ze)(ze)(ze)(ze)等待充(chong)電(dian)(dian)(dian)(dian)(dian)(dian)(dian)器的(de)接(jie)入以進(jin)行(xing)(xing)充(chong)電(dian)(dian)(dian)(dian)(dian)(dian)(dian)。 在(zai)整個過(guo)程(cheng)中(zhong),該電(dian)(dian)(dian)(dian)(dian)(dian)(dian)路(lu)將始終(zhong)(zhong)實(shi)時檢測(ce)(ce)電(dian)(dian)(dian)(dian)(dian)(dian)(dian)池信(xin)息,若有(you)異常情況發生(sheng),則(ze)(ze)(ze)(ze)立即利用中(zhong)斷(duan)(duan)信(xin)號終(zhong)(zhong)止(zhi)正在(zai)進(jin)行(xing)(xing)的(de)充(chong)電(dian)(dian)(dian)(dian)(dian)(dian)(dian)或者放電(dian)(dian)(dian)(dian)(dian)(dian)(dian)過(guo)程(cheng),關(guan)斷(duan)(duan)充(chong)放電(dian)(dian)(dian)(dian)(dian)(dian)(dian)回(hui)路(lu),同時進(jin)行(xing)(xing)報(bao)警(jing)并(bing)提示(shi)報(bao)警(jing)原因(yin)。
4 測試結果
本充電器的各項指標如下:
(1) 輸入(ru)電流:50/ 60 Hz。
(2) AC/ DC 輸出電壓48 :V , AC/ DC 輸出電流:5. 0 A。
(3) 恒流(liu)充(chong)電(dian)電(dian)流(liu):4. 5 A。
(4) 恒壓充電電壓:45 V (AC)。
(5) 環境(jing)溫度: - 5~45 ℃。
經分析, 按上述(shu)設計和(he)分析結果, 最后(hou)選定LLC 的參數Cr = 0. 043 055μF,Lr = 72. 636 09μH,Lm = 435. 816 5μH。
本智能充電器經測試,充電保護措施可靠,充電狀態準確,充電時間約為6 h ,如果需要進一步縮短充電時間,只需在初始化時設定更大的充電電流即可。 因為采用PWM 控制(zhi)器,所(suo)以,充(chong)電效(xiao)率可以達(da)到92 %以上,最(zui)低(di)時在85 %左右。根據實際(ji)需(xu)要(yao),要(yao)想達(da)到理想的(de)充(chong)電效(xiao)率,對充(chong)器件做(zuo)進一步的(de)精(jing)確要(yao)求。
在智能充電器控制系統設計過程中,主要側重點是保證充電器對充(chong)電電池電壓的(de)(de)(de)精確控制,設計中(zhong)元器(qi)件(jian)的(de)(de)(de)選型(xing)也都是(shi)圍(wei)繞著(zhu)這個重點來完成的(de)(de)(de)經過實(shi)驗電路的(de)(de)(de)實(shi)際測(ce)試,由電源變(bian)(bian)壓器(qi)、整流電路、濾波電路及穩壓電路構成AC/ DC 變(bian)(bian)換電路。 在NCP1653 、NCP1396 與S3F84 K4 的(de)(de)(de)配合(he)控制下可實(shi)現很高的(de)(de)(de)系統精度。