開關電源穩定性設計
眾所周知,任何閉環系統在增益為單位增益l,且內部隨頻率變化的相移為360°時,該閉環控制系統都會存在不穩定的可能性。因此幾乎所有的開關電源都有(you)一個(ge)閉環(huan)(huan)反饋(kui)控(kong)(kong)制(zhi)系統(tong),從而能(neng)獲得較好的(de)(de)性能(neng)。在(zai)(zai)負反饋(kui)系統(tong)中(zhong),控(kong)(kong)制(zhi)放(fang)大器的(de)(de)連接方式(shi)有(you)意地引入(ru)了180°相移(yi),如果反饋(kui)的(de)(de)相位保持在(zai)(zai)180°以內,那么(me)控(kong)(kong)制(zhi)環(huan)(huan)路(lu)將總是(shi)穩定的(de)(de)。當然,在(zai)(zai)現實中(zhong)這種情況(kuang)是(shi)不會存(cun)在(zai)(zai)的(de)(de),由于(yu)各(ge)(ge)種各(ge)(ge)樣(yang)的(de)(de)開(kai)關延時和電(dian)抗引入(ru)了額外的(de)(de)相移(yi),如果不采用適(shi)合的(de)(de)環(huan)(huan)路(lu)補償,這類(lei)相移(yi)同樣(yang)會導致開(kai)關電(dian)源的(de)(de)不穩定。
1 穩定性指標
衡量開關電(dian)源(yuan)穩(wen)定(ding)性的指(zhi)標是(shi)(shi)相位裕(yu)(yu)度和增(zeng)(zeng)益(yi)(yi)裕(yu)(yu)度。相位裕(yu)(yu)度是(shi)(shi)指(zhi):增(zeng)(zeng)益(yi)(yi)降到0dB時(shi)所(suo)對應的相位。增(zeng)(zeng)益(yi)(yi)裕(yu)(yu)度是(shi)(shi)指(zhi):相位為零時(shi)所(suo)對應的增(zeng)(zeng)益(yi)(yi)大小(實(shi)際是(shi)(shi)衰(shuai)減(jian))。在(zai)實(shi)際設計開關電(dian)源(yuan)時(shi),只在(zai)設計反(fan)激變(bian)換器(qi)時(shi)才(cai)考慮增(zeng)(zeng)益(yi)(yi)裕(yu)(yu)度,設計其它(ta)變(bian)換器(qi)時(shi),一般不(bu)使(shi)用增(zeng)(zeng)益(yi)(yi)裕(yu)(yu)度。
在開關電源設計中,相位(wei)裕(yu)(yu)度(du)有兩個相互獨立(li)作用(yong):一(yi)是可(ke)以阻尼(ni)變(bian)(bian)換器在負(fu)(fu)載階躍變(bian)(bian)化(hua)時(shi)出現(xian)的動態(tai)過程(cheng);另一(yi)個作用(yong)是當元器件(jian)參數發生變(bian)(bian)化(hua)時(shi),仍然(ran)可(ke)以保(bao)證系(xi)統穩定。相位(wei)裕(yu)(yu)度(du)只能(neng)用(yong)來保(bao)證“小信(xin)號穩定”。在負(fu)(fu)載階躍變(bian)(bian)化(hua)時(shi),電源不(bu)可(ke)避免(mian)要(yao)進入(ru)“大(da)信(xin)號穩定”范圍。工程(cheng)中我們認為在室溫和(he)標準(zhun)輸(shu)入(ru)、正常(chang)(chang)負(fu)(fu)載條件(jian)下(xia),環路的相位(wei)裕(yu)(yu)度(du)要(yao)求大(da)于45°。在各種參數變(bian)(bian)化(hua)和(he)誤差情況下(xia),這(zhe)個相位(wei)裕(yu)(yu)度(du)足以確保(bao)系(xi)統穩定。如(ru)果負(fu)(fu)載變(bian)(bian)化(hua)或者輸(shu)入(ru)電壓(ya)范圍變(bian)(bian)化(hua)非常(chang)(chang)大(da),考(kao)慮在所有負(fu)(fu)載和(he)輸(shu)入(ru)電壓(ya)下(xia)環路和(he)相位(wei)裕(yu)(yu)度(du)應大(da)于30°。
如圖(tu)l所示為(wei)開關(guan)電源(yuan)控制(zhi)方框示意圖(tu),開關(guan)電源(yuan)控制(zhi)環路由以下3部分構成。
(1)功(gong)率(lv)變(bian)(bian)換器部分,主要包含方波驅動功(gong)率(lv)開關(guan)、主功(gong)率(lv)變(bian)(bian)壓器和輸出濾波器;
(2)脈沖寬度調節部分,主(zhu)要(yao)包(bao)含PWM脈寬比(bi)較器(qi)、圖騰柱功(gong)率放大;
(3)采(cai)樣、控制比較(jiao)放(fang)(fang)大(da)部分(fen),主要(yao)包(bao)含輸(shu)(shu)出(chu)電(dian)(dian)壓(ya)采(cai)樣、比較(jiao)、放(fang)(fang)大(da)(如TL431)、誤差放(fang)(fang)大(da)傳(chuan)輸(shu)(shu)(如光(guang)電(dian)(dian)耦合器)和(he)PWM集成(cheng)電(dian)(dian)路內部集成(cheng)的(de)電(dian)(dian)壓(ya)比較(jiao)器(這些放(fang)(fang)大(da)器的(de)補償設計最大(da)程度(du)的(de)決定(ding)著開關(guan)電(dian)(dian)源系(xi)統(tong)穩定(ding)性(xing),是(shi)設計的(de)重點(dian)和(he)難(nan)點(dian))。
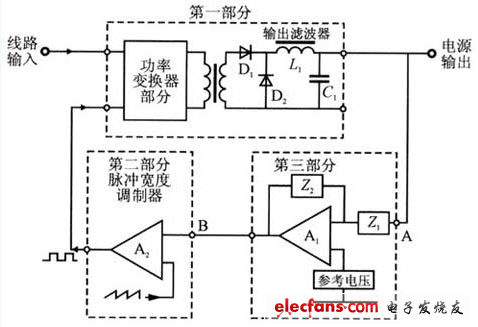
圖1 開關電(dian)源控(kong)制(zhi)環路(lu)示意圖
2 穩定性分析
如(ru)(ru)(ru)圖1所(suo)示,假如(ru)(ru)(ru)在(zai)節點A處引入干(gan)擾(rao)波。此(ci)方波所(suo)包含(han)的(de)能量(liang)分配成無(wu)限列奇(qi)次(ci)諧(xie)波分量(liang)。如(ru)(ru)(ru)果檢(jian)測到真實系(xi)(xi)統(tong)對不(bu)斷增大的(de)諧(xie)波有(you)響應,則可以看出增益(yi)和相(xiang)移(yi)也隨著(zhu)頻(pin)率的(de)增加而改變。如(ru)(ru)(ru)果在(zai)某一頻(pin)率下(xia)(xia)增益(yi)等于l且總(zong)的(de)額(e)外相(xiang)移(yi)為180°(此(ci)相(xiang)移(yi)加上原先設(she)定的(de)180°相(xiang)移(yi),總(zong)相(xiang)移(yi)量(liang)為360°),那么(me)將(jiang)(jiang)會(hui)有(you)足夠的(de)能量(liang)返(fan)回到系(xi)(xi)統(tong)的(de)輸入端,且相(xiang)位與(yu)原相(xiang)位相(xiang)同,那么(me)干(gan)擾(rao)將(jiang)(jiang)維持(chi)下(xia)(xia)去,系(xi)(xi)統(tong)在(zai)此(ci)頻(pin)率下(xia)(xia)振蕩。如(ru)(ru)(ru)圖2所(suo)示,通常情況下(xia)(xia),控(kong)制放(fang)大器都(dou)會(hui)采用(yong)反饋補償元器件Z2減少更高頻(pin)率下(xia)(xia)的(de)增益(yi),使得開關電(dian)源在(zai)所(suo)有(you)頻(pin)率下(xia)(xia)都(dou)保持(chi)穩定。
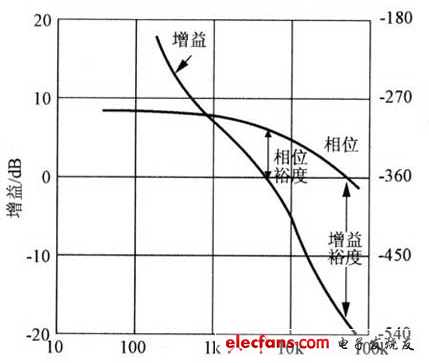
圖(tu)2 開關(guan)電(dian)源的伯特圖(tu)(相位裕度、增(zeng)益裕度)
波特(te)(te)圖對應(ying)(ying)于小信(xin)(xin)(xin)號(理論上的小信(xin)(xin)(xin)號是(shi)無限(xian)小的)擾(rao)動(dong)時(shi)系(xi)(xi)統(tong)(tong)的響(xiang)(xiang)應(ying)(ying);但是(shi)如果(guo)擾(rao)動(dong)很大(da),系(xi)(xi)統(tong)(tong)的響(xiang)(xiang)應(ying)(ying)可能(neng)不(bu)是(shi)由反(fan)饋的線(xian)(xian)性(xing)(xing)部分(fen)決定的,而(er)可能(neng)是(shi)由非線(xian)(xian)性(xing)(xing)部分(fen)決定的,如運放的壓(ya)擺率、增益帶寬(kuan)或者電(dian)(dian)路(lu)中可能(neng)達到的最小、最大(da)占空比等。當這些因素影響(xiang)(xiang)系(xi)(xi)統(tong)(tong)響(xiang)(xiang)應(ying)(ying)時(shi),原來的系(xi)(xi)統(tong)(tong)就(jiu)會表現為非線(xian)(xian)性(xing)(xing),而(er)且傳遞函數的方法(fa)就(jiu)不(bu)能(neng)繼續(xu)使(shi)用了。因此,雖(sui)然小信(xin)(xin)(xin)號穩(wen)定是(shi)必(bi)須(xu)滿(man)足的,但還(huan)不(bu)足以保(bao)證電(dian)(dian)源(yuan)(yuan)(yuan)的穩(wen)定工作(zuo)。因此,在設計電(dian)(dian)源(yuan)(yuan)(yuan)環路(lu)補償(chang)時(shi),不(bu)但要(yao)考慮信(xin)(xin)(xin)號電(dian)(dian)源(yuan)(yuan)(yuan)系(xi)(xi)統(tong)(tong)的響(xiang)(xiang)應(ying)(ying)特(te)(te)性(xing)(xing),還(huan)要(yao)處(chu)理好(hao)電(dian)(dian)源(yuan)(yuan)(yuan)系(xi)(xi)統(tong)(tong)的大(da)信(xin)(xin)(xin)號響(xiang)(xiang)應(ying)(ying)特(te)(te)性(xing)(xing)。電(dian)(dian)源(yuan)(yuan)(yuan)系(xi)(xi)統(tong)(tong)對大(da)信(xin)(xin)(xin)號響(xiang)(xiang)應(ying)(ying)特(te)(te)性(xing)(xing)的優(you)劣可以通過(guo)負(fu)載躍(yue)變(bian)(bian)響(xiang)(xiang)應(ying)(ying)特(te)(te)性(xing)(xing)和輸(shu)入電(dian)(dian)壓(ya)躍(yue)變(bian)(bian)響(xiang)(xiang)應(ying)(ying)特(te)(te)性(xing)(xing)來判(pan)斷,負(fu)載躍(yue)變(bian)(bian)響(xiang)(xiang)應(ying)(ying)特(te)(te)性(xing)(xing)和輸(shu)入電(dian)(dian)壓(ya)躍(yue)變(bian)(bian)響(xiang)(xiang)應(ying)(ying)特(te)(te)性(xing)(xing)存在很強的連帶關(guan)系(xi)(xi),負(fu)載躍(yue)變(bian)(bian)響(xiang)(xiang)應(ying)(ying)特(te)(te)性(xing)(xing)好(hao),則輸(shu)入電(dian)(dian)壓(ya)躍(yue)變(bian)(bian)響(xiang)(xiang)應(ying)(ying)特(te)(te)性(xing)(xing)一定好(hao)。
對開關(guan)電(dian)源環路穩(wen)定(ding)性(xing)(xing)判據的(de)理論(lun)分(fen)析是很復雜(za)的(de),這是因為傳遞(di)函數隨(sui)(sui)著負(fu)載條件的(de)改變(bian)(bian)而(er)改變(bian)(bian)。各種(zhong)不同線繞(rao)功率元器件的(de)有效電(dian)感(gan)值通(tong)常會隨(sui)(sui)著負(fu)載電(dian)流而(er)改變(bian)(bian)。此(ci)外,在考慮大信號瞬態的(de)情況下,控制(zhi)電(dian)路工作(zuo)(zuo)方式(shi)轉變(bian)(bian)為非線性(xing)(xing)工作(zuo)(zuo)方式(shi),此(ci)時僅用線性(xing)(xing)分(fen)析將無法得到完整的(de)狀態描述(shu)。下面詳細介(jie)紹通(tong)過(guo)對負(fu)載躍變(bian)(bian)瞬態響應波形分(fen)析來判斷開關(guan)電(dian)源環路穩(wen)定(ding)性(xing)(xing)。
3 穩定性測試
測試條件:
(1)無感電阻;
(2)負載變(bian)化幅度為10%~100%;
(3)負(fu)載開關頻率(lv)可調(在獲得同樣理想響應波形的(de)條(tiao)件下,開關頻率(lv)越高越好);
(4)限定負載開(kai)關電流(liu)變化(hua)率為5A/μs或者2A/μs,沒有聲明(ming)負載電流(liu)大小和變化(hua)率的(de)瞬態(tai)響應曲線圖形(xing)無(wu)任何意義。
圖3(a)為瞬變負載波形(xing)。
圖(tu)3(b)為阻(zu)尼響應(ying),控制環在(zai)瞬變邊緣之后(hou)帶有振蕩。說明(ming)擁有這種響應(ying)電源的增益裕(yu)度和相位裕(yu)度都很小,且只能(neng)在(zai)某些特定條件下才能(neng)穩(wen)定。因此,要(yao)盡量避免(mian)這種類型(xing)的響應(ying),補償網絡也應(ying)該調整在(zai)稍低的頻率下滑離。
圖3(c)為過(guo)阻尼響應,雖然比較穩定,但是瞬態恢復(fu)性能并(bing)非最好。滑離頻率應該增大。
圖3(d)為理(li)想響應(ying)波(bo)形,接近(jin)最(zui)優情況,在絕大(da)多數應(ying)用中(zhong),瞬(shun)態響應(ying)穩定且性能優良,增(zeng)益裕(yu)(yu)度和相位裕(yu)(yu)度充(chong)足。
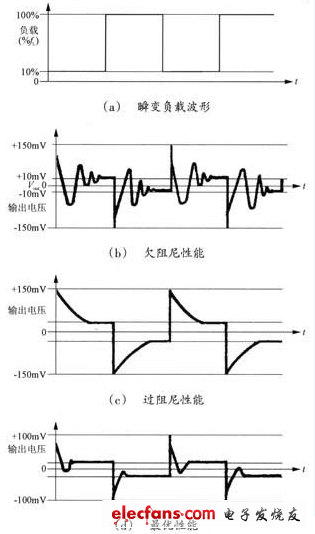
圖3 開(kai)關電(dian)源(yuan)瞬態負載條件(jian)下的幾種(zhong)類型
對(dui)于正向和負向尖峰,對(dui)稱的(de)波形是(shi)同(tong)樣需(xu)要的(de),因此從(cong)它可以看出控制部(bu)分(fen)和電源部(bu)分(fen)在控制內有(you)中心線,且在負載的(de)增(zeng)大和減(jian)少的(de)情況(kuang)下它們的(de)擺動速(su)率是(shi)相同(tong)的(de)。
上面介紹了開關電源控制環(huan)路(lu)的兩個(ge)穩定(ding)(ding)性(xing)判據(ju),就是(shi)通過波(bo)特圖判定(ding)(ding)小信號下(xia)(xia)開關電源控制環(huan)路(lu)的相位裕度(du)和通過負(fu)載躍變瞬態(tai)響應(ying)波(bo)形判定(ding)(ding)大信號下(xia)(xia)開關電源控制環(huan)路(lu)的穩定(ding)(ding)性(xing)。