電動車36V鋰電池組保護電路設計方案
隨著(zhu)電(dian)(dian)(dian)動(dong)自行車的(de)(de)(de)(de)(de)逐漸普及,電(dian)(dian)(dian)動(dong)自行車的(de)(de)(de)(de)(de)主要能(neng)源---鋰電(dian)(dian)(dian)池(chi)(chi)(chi)(chi)也(ye)成(cheng)為眾人(ren)關心的(de)(de)(de)(de)(de)焦點。 鋰電(dian)(dian)(dian)池(chi)(chi)(chi)(chi)與鎳(nie)鎘、鎳(nie)氫電(dian)(dian)(dian)池(chi)(chi)(chi)(chi)不(bu)太一樣,因其能(neng)量密(mi)度高(gao),對充放(fang)電(dian)(dian)(dian)要求很(hen)高(gao)。 當過充、過放(fang)、過流及短(duan)路保護等(deng)情(qing)況發生時,鋰電(dian)(dian)(dian)池(chi)(chi)(chi)(chi)內的(de)(de)(de)(de)(de)壓力與熱量大量增加(jia),容易產生爆炸,因此通常都會在(zai)電(dian)(dian)(dian)池(chi)(chi)(chi)(chi)包內加(jia)保護電(dian)(dian)(dian)路,用以提高(gao)鋰電(dian)(dian)(dian)池(chi)(chi)(chi)(chi)的(de)(de)(de)(de)(de)使用壽命。 針對目前電(dian)(dian)(dian)動(dong)車鋰電(dian)(dian)(dian)池(chi)(chi)(chi)(chi)組所用的(de)(de)(de)(de)(de)保護電(dian)(dian)(dian)路大多都由分(fen)立原(yuan)件構成(cheng),存在(zai)控(kong)制(zhi)精度不(bu)夠高(gao)、技(ji)術指(zhi)標低、不(bu)能(neng)有效保護鋰電(dian)(dian)(dian)池(chi)(chi)(chi)(chi)組等(deng)特點,本文中提出一種基(ji)于單片(pian)機的(de)(de)(de)(de)(de)電(dian)(dian)(dian)動(dong)車36 V鋰電(dian)(dian)(dian)池(chi)(chi)(chi)(chi)組(由10節3. 6 V鋰電(dian)(dian)(dian)池(chi)(chi)(chi)(chi)串聯(lian)而(er)成(cheng))保護電(dian)(dian)(dian)路設計方(fang)案,利用高(gao)性能(neng)、低功耗(hao)的(de)(de)(de)(de)(de)ATmega16L 單片(pian)機作為檢測(ce)和控(kong)制(zhi)核心,用由MC34063構成(cheng)的(de)(de)(de)(de)(de)DC /DC變換控(kong)制(zhi)電(dian)(dian)(dian)路為整個(ge)(ge)保護電(dian)(dian)(dian)路提供穩壓電(dian)(dian)(dian)源,輔(fu)以LM60 測(ce)溫、MOS管IRF530N作充放(fang)電(dian)(dian)(dian)控(kong)制(zhi)開關,實現(xian)對整個(ge)(ge)電(dian)(dian)(dian)池(chi)(chi)(chi)(chi)組和單個(ge)(ge)電(dian)(dian)(dian)池(chi)(chi)(chi)(chi)的(de)(de)(de)(de)(de)狀態(tai)監控(kong)和保護功能(neng),達到延長電(dian)(dian)(dian)池(chi)(chi)(chi)(chi)使用壽命的(de)(de)(de)(de)(de)目的(de)(de)(de)(de)(de)。
1 保護電路硬件設計
本系統以(yi)單片機為數(shu)據(ju)處理和控(kong)制(zhi)的(de)核心,將任務(wu)設計(ji)分解為電(dian)壓測(ce)量(liang)(liang)(liang)、電(dian)流測(ce)量(liang)(liang)(liang)、溫度測(ce)量(liang)(liang)(liang)、開(kai)關(guan)控(kong)制(zhi)、電(dian)源(yuan)、均衡(heng)充(chong)電(dian)等(deng)功能(neng)模塊(kuai)。 系統的(de)總體框圖如圖1所示。
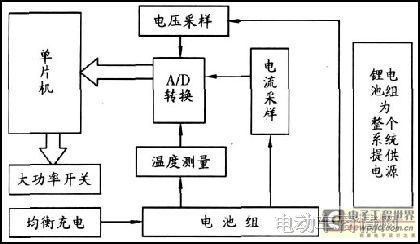
圖(tu)1 系統的總體框圖(tu)
電(dian)池組電(dian)壓、電(dian)流、溫(wen)度等信(xin)息通過電(dian)壓采(cai)樣、電(dian)流采(cai)樣和(he)溫(wen)度測量電(dian)路(lu),加到信(xin)號(hao)采(cai)集部分的(de)A /D輸入(ru)端。 A /D模塊將輸入(ru)的(de)模擬信(xin)號(hao)轉換(huan)為數字信(xin)號(hao),并傳(chuan)輸給單(dan)片機。 單(dan)片機作為數據(ju)處理和(he)控制的(de)核心(xin),一方(fang)面實時監控電(dian)池組的(de)各(ge)項性能(neng)(neng)(neng)指標和(he)狀態,一方(fang)面根(gen)據(ju)這些狀態參數控制驅動大功率開關(guan)。 由于使用(yong)了(le)單(dan)片機,使系(xi)統(tong)具有很大的(de)靈活性,便于實現(xian)各(ge)種(zhong)復雜(za)控制,從而能(neng)(neng)(neng)方(fang)便地對系(xi)統(tong)進行功能(neng)(neng)(neng)擴展和(he)性能(neng)(neng)(neng)改進。
1. 1 ATmega16 L單片機模塊
從低功耗、低成本設計角度出發,單片機模塊采用高性能、低功耗的ATmega16 L單片機作為檢測與控制核心。 ATmega16 L 是基于增強的AVRR ISC結構的低功耗8位CMOS微控制器,內部帶有16 k 字節的系統內可編程Flash, 512 字節EEPROM, 1 k字節SRAM, 32個通用I/O口線, 32個通用工作寄存器(用于邊界掃描的JTAG接口,支持片內調試與編程) , 3個具有比較模式的靈活定時器/計數器( T/C) (片內/外中斷) ,可編程串行USART,有起始條件檢測器的通用串行接口, 8路10位具有可選差分輸入級可編程增益( TQFP封裝)的ADC,具有片內振蕩器的可編程看門狗定時器,一個SP I串行端口,以及6個可以通過軟件進行選擇的省電模式。 由于其先進的指令集以及單時鐘周期指令執行時間,ATmega16 L的數據吞吐率高達1M IPS/MHz,從而可以緩減系統功耗和處理速度之間的矛盾。
單片機的輸入輸出設計如圖2所示。 由電源部分降壓、穩壓得到的3. 3 V電壓通過端口10為單片機提供工作電壓;端口12和13為反向振蕩放大器與片內時鐘操作電路的輸入端和反向振蕩放大器的輸出端,為單片機提供工作晶振;端口30是端口A與A /D轉換器的電源,使用ADC時通過一個低通濾波器與端口10的VCC連接;端口37,38的ADC3, ADC2是經過轉換后待檢測的電壓、電流值;端口39, 40的ADC1,ADC0是經過溫度傳感器轉換后的溫控電壓值。
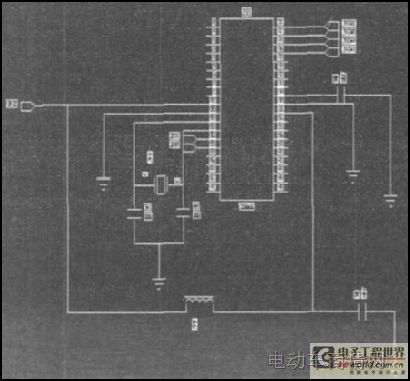
圖(tu)2 單片(pian)機的外(wai)圍電路(lu)設(she)計
1. 2 穩壓電源模塊
穩壓電源是單片機系統的重要組成部分,它不僅為系統提供多路電源電壓,還直接影響到系統的技術指標和抗干擾性能。 ATmega16 L單片機的工作電壓為2. 7~5. 5 V,為保證單片機穩定的工作電壓為3. 3 V. 穩壓部分是由MC34063構成的DC /DC變換控制電路,從電池組分出的25 V電壓經過電路降壓、穩壓,輸出3. 3 V,供保護電路工作,其電路如圖3所示。
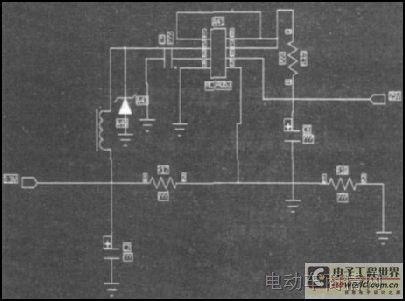
圖(tu)3 穩壓電源模塊電路
1. 3 充電均衡模塊
采用模擬電路方案。 即在每節電池的外部搭建過壓保護電路,充電過程中當電壓超過預定值時,保護電路自動閉合,使電池通過電阻回路放電,以保護電池不會過度充電。 當電池電壓減小到均衡充電動作電壓4. 18 V時,保護電路自動斷開。
1. 4 電壓電流測量模塊
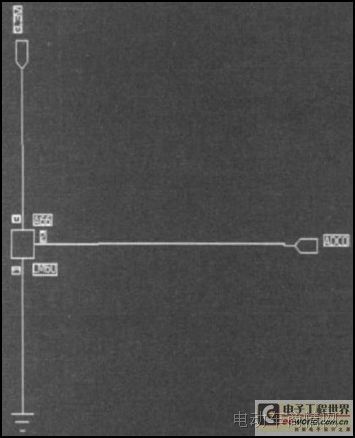
待測的電壓通過集成運算放大器LM358,將輸出送至單片機進行檢測。 LM358內部包括2個獨立、高增益、內部頻率補償的雙運算放大器,適合于電源電壓范圍很寬的單電源使用和雙電源工作模式,由于其低功耗電流,也適合于電池。 用霍爾傳感器UGN - 3501 M 檢測直流電流。 UGN -3501M是集成型霍爾傳感器,采用差動霍爾電壓輸出,檢測靈敏度為1. 4 V /0. 1T.
電(dian)(dian)(dian)(dian)(dian)(dian)壓(ya)(ya)電(dian)(dian)(dian)(dian)(dian)(dian)流檢(jian)測(ce)電(dian)(dian)(dian)(dian)(dian)(dian)路的(de)設(she)計如圖(tu)4 所示。 運算放(fang)(fang)大器LM358的(de)5, 6引(yin)腳(jiao)所接的(de)BB,AA為待測(ce)的(de)充(chong)電(dian)(dian)(dian)(dian)(dian)(dian)、放(fang)(fang)電(dian)(dian)(dian)(dian)(dian)(dian)電(dian)(dian)(dian)(dian)(dian)(dian)壓(ya)(ya),經過放(fang)(fang)大后(hou)由(you)7腳(jiao)輸出至單(dan)片機(ji)進(jin)行(xing)檢(jian)測(ce),當(dang)檢(jian)測(ce)到待測(ce)電(dian)(dian)(dian)(dian)(dian)(dian)壓(ya)(ya)達到過充(chong)、過放(fang)(fang)保護(hu)電(dian)(dian)(dian)(dian)(dian)(dian)壓(ya)(ya)時(shi),由(you)單(dan)片機(ji)控制斷(duan)開(kai)充(chong)放(fang)(fang)電(dian)(dian)(dian)(dian)(dian)(dian)回路。 電(dian)(dian)(dian)(dian)(dian)(dian)流檢(jian)測(ce)通過霍(huo)爾傳感器完成,如圖(tu)4所示,將(jiang)從(cong)UGN -3501M1, 8引(yin)腳(jiao)輸出的(de)霍(huo)爾電(dian)(dian)(dian)(dian)(dian)(dian)壓(ya)(ya)uH 接至LM358的(de)3, 4引(yin)腳(jiao),經過放(fang)(fang)大后(hou)從(cong)1 腳(jiao)輸出ADC3 至單(dan)片機(ji),進(jin)行(xing)過電(dian)(dian)(dian)(dian)(dian)(dian)流保護(hu)。 UGN - 3501M 的(de)5, 6, 7引(yin)腳(jiao)連(lian)接調(diao)整電(dian)(dian)(dian)(dian)(dian)(dian)位器,用以(yi)補償(chang)不(bu)等位電(dian)(dian)(dian)(dian)(dian)(dian)勢,同(tong)時(shi)改善線(xian)性(xing)。 調(diao)整5, 6引(yin)腳(jiao)外接電(dian)(dian)(dian)(dian)(dian)(dian)阻(zu)R16,可使輸出霍(huo)爾電(dian)(dian)(dian)(dian)(dian)(dian)壓(ya)(ya)uH 與(yu)磁場強度有較好的(de)線(xian)性(xing)關(guan)系。
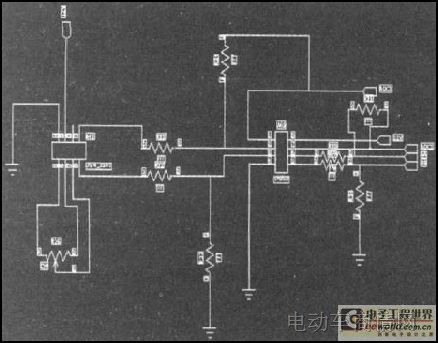
圖(tu)4 電(dian)(dian)壓電(dian)(dian)流檢測(ce)電(dian)(dian)路
1. 5 溫度檢測模塊
溫度檢測和控制模塊選用電壓輸出型的半導體溫度傳感器LM60. 該傳感器是一種已校正的集成化溫度傳感器,它的工作溫度范圍是- 40 ℃至125 ℃,工作電壓范圍是2. 7 V至10 V. 信號輸出與溫度成正比,信號大小可達+ 6. 25 mV /℃。
基于LM60的溫(wen)度(du)檢(jian)測(ce)電(dian)(dian)(dian)路如圖5所(suo)示(shi)。 由穩壓(ya)(ya)(ya)部分輸(shu)出的3. 3 V 電(dian)(dian)(dian)源為(wei)此電(dian)(dian)(dian)路供電(dian)(dian)(dian),經過(guo)溫(wen)度(du)傳感器將(jiang)探測(ce)點的溫(wen)度(du)轉化為(wei)電(dian)(dian)(dian)壓(ya)(ya)(ya)值通(tong)過(guo)ADC0,ADC1輸(shu)出,再將(jiang)ADC0, ADC1送入單(dan)片(pian)機進行檢(jian)測(ce),當電(dian)(dian)(dian)壓(ya)(ya)(ya)值達到溫(wen)控要(yao)求時,單(dan)片(pian)機控制開(kai)關通(tong)斷(duan)。
圖(tu)5 溫度檢測電路
1. 6 開關模塊
開關采用MOSFET,型號選用P溝道的MOS管的IR530N. 工作原理:單片機控制端口輸出高電平,功率三極管導通,功率場效應管的柵極和漏極之間產生壓降,功率場效應管導通。
2 軟件設計
本系統(tong)軟件采(cai)用(yong)C語言編(bian)寫,處理程(cheng)序采(cai)用(yong)模(mo)塊化(hua)編(bian)程(cheng), 程(cheng)序運行的環境(jing)是ICCAVR 開發系統(tong)。
在電(dian)(dian)池(chi)組(zu)空載(zai)的(de)時候,系統進入掉電(dian)(dian)模式,以使功耗降至最低(di);當(dang)電(dian)(dian)池(chi)組(zu)接入負載(zai)或對電(dian)(dian)池(chi)組(zu)充電(dian)(dian)時,單片機被激活(huo),由低(di)功耗掉電(dian)(dian)模式轉入正常工作模式,并持(chi)續運作。 整個程(cheng)序的(de)流程(cheng)如圖6所示。
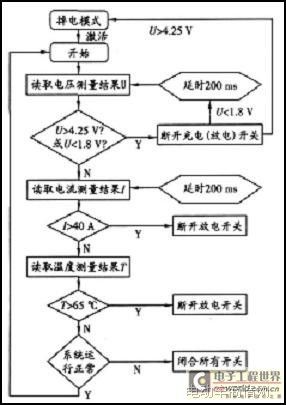
圖6 程(cheng)序流程(cheng)
根據本系統(tong)的模塊(kuai)(kuai)分(fen)布,單片機程(cheng)序(xu)分(fen)為電壓測量模塊(kuai)(kuai)、電流測量模塊(kuai)(kuai)和(he)溫度(du)測量模塊(kuai)(kuai),每一(yi)模塊(kuai)(kuai)調(diao)用共(gong)同A /D轉換函(han)數和(he)延時(shi)判斷(duan)函(han)數等,以(yi)縮(suo)短代(dai)碼(ma)(ma)長度(du)和(he)增強程(cheng)序(xu)代(dai)碼(ma)(ma)的可讀性(xing)。 下面給出程(cheng)序(xu)主函(han)數的代(dai)碼(ma)(ma):
void main (void)
{
int ( ) ; / /單片機初始化,打開所有開關;
sleep ( ) ; / /單片機進入休眠模式;
int sign |= 1;
while ( sign = = 1 ) / /判斷系統是否運行正常;
{ int( ) ;
dianya ( ) ; / /調用測壓模塊;
delay(30000) ;
delay(30000) ;
dianliu ( ) ; / /調用測流模塊;
delay(30000) ;
delay(30000) ;
wendu ( ) ; / /調用溫度模塊;
delay(30000) ;
delay(30000) ;
}
int ( ) ;
sign |= 1;
main ( ) ;
}
3 結束語
通過實(shi)驗,本保護(hu)(hu)電路系(xi)統實(shi)現了全部基本功能。 與傳(chuan)統采(cai)用(yong)分離元件的(de)電池(chi)保護(hu)(hu)系(xi)統相比(bi),本文中提(ti)出基于單(dan)片(pian)機的(de)電池(chi)保護(hu)(hu)電路系(xi)統具有(you)系(xi)統體積(ji)小、功能多(duo)、功耗低(di)、成本低(di)等特點,可用(yong)于工(gong)業生產。